")
At Y Soft, we use robots to test our solutions for verification and validation aspects, we are interested if the system works according to required specifications and what are the qualities of the system. To save time and money, it is possible to use a single robot to test multiple devices simultaneously. How is this done? It is very simple so let’s look at it.
When performing actions to operate given a device, the robot knows where the device is located due to a calibration. The calibration file contains transformation matrix that can transform location on the device to robot’s coordinate system. The file also contains information about the device that is compatible with the calibration. How the calibration is computed is covered in this article. There is also calibration of the camera that contains information about the region of interest, meaning where exactly is the device screen located in the view of a camera. All of the calibration files are stored on the hard drive.
Example of calibration files for two Terminal Professionals:
{
"ScreenXAngle":0.35877067027057225,
"DeviceId":18,
"DeviceModelId":18,
"DeviceName":"Terminal_Professional 4, 10.0.5.182",
"MatrixArray":[[0.728756457140,0.651809992529,-0.159500429741,75.4354297376],[-0.683749126568,0.734998176419,-0.10936964140,71.1249458777],[0.0422532822652,0.187897834122,0.981120733880,-34.923427696],[0.0,0.0,0.0,1.0]] ,
"ScreenSize":{ "Width":153.0, "Height":91.0 }
}
{
"ScreenXAngle":0.25580856461537194,
"DeviceId":27,
"DeviceModelId":18,
"DeviceName":"Terminal_Professional 4, 10.0.5.112",
"MatrixArray":[ [0.713158843830,-0.686471581194,0.220191724515,-176.983055],[0.699596463347,0.6783511825194,-0.15148794414,-71.7788394],[-0.05297850752,0.2635031531279,0.963621817536,-29.83848504],[0.0,0.0,0.0,1.0] ],
"ScreenSize":{ "Width":153.0, "Height":91.0 }
}
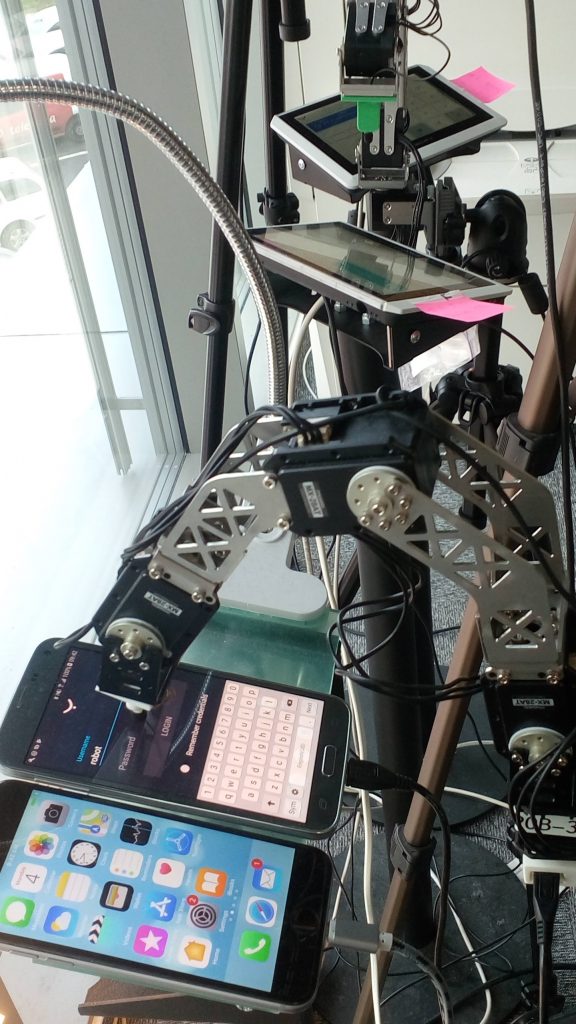
For the robot to operate on multiple devices, all of the devices must be within the robot’s operational range, which is quite limited, so this feature is currently is only used for smaller devices, like mobile phones and Terminal Professional. It is theoretically possible to use a single robot on more devices, but for practical purposes, there are usually only 2 devices. Also, all devices must be at relatively the same height, which limits testing on multifunctional devices that have various height and terminal placement. Space is also limited by the camera’s range, so multiple cameras might be required, but this is not a problem as camera calibration also contains the unique identifier of a camera. Therefore a robot can operate on multiple devices using multiple cameras or just a single camera if devices are very close to each other.
Before testing begins, a robot needs to have all calibrations of devices available on the hard drive and all action elements (buttons) need to be within its operational range. Test configuration contains variables such as DEVICE_ID and DEVICE2_ID which need to contain correct device IDs as stored the robot’s database. Which tests will run on the devices and the duration of the tests also need to be specified. Tests used for these devices are usually measurement and endurance tests, which run in iterations. There are multiple variants for these tests, for example, let’s say we wish to run tests for 24 hours on two devices and each device should have an equal fraction of this time. This means that the test will run for 12 hours on one device and 12 hours on the other, which is called consecutive testing. Another variant is simultaneous testing, which means that the robot will alternate between the devices after each iteration for a total time of 24 hours. The robot loads the calibration for another device after each iteration and continues with the test on that device. This is sometimes very useful should one device become unresponsive, the test can continue on the second device for the remaining time. Results of each iteration of the test for each device are stored in a database along with other information about the test and can be viewed later.
Testing multiple devices with a single robot also makes it possible to test and compare different versions of an application or operating system (in this case on Terminal Professional) without ending the test, reinstalling of the device and running the test again. This saves a lot of time and makes the comparison more accurate.