Y Soft is using a robotic arm for testing multi-functional devices, but the robotic arm is not enough for our testing purpose. We need to interact with the device in different ways than just tapping on the touchscreen. A Screen of the tested device is already captured by a camera, therefore it is needed another feedback from a device and react to that feedback. Due to that, we developed Modular sensor platform, which can be easily plugged into a computer (Web API server) by USB. Via REST API protocol you can read information or command different kinds of sensors and actors. The following diagram illustrates how the platform is composed.
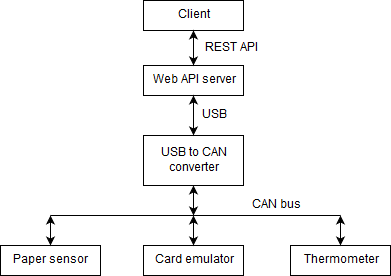
Web API server
As this diagram shows you can connect multiple sensors to the server via USB to CAN converter. When the web server starts it sends discovery packet. From the responses, the web knows what types and how many sensors are connected. After initialization, it starts listening to sensors commands from clients.
The web API server is written using ASP.NET Core framework. In the following link, you can find a tutorial, which shows you a simplicity of creating a RESTful application and from which components the server is composed.
The .NET Core is cross-platform so the web server can run on any device running Linux, macOS or Windows.
Try to create ASP.NET Core application based on tutorial above or you can just create a console application (see link). The Created application can be built for any supported OS, for ARM there is available only runtime, not SDK for developing an application (see SDK support, ARM Runtime).
Build for a device is as simple as run this command
dotnet publish -r <Runtime identifier>
in the directory of the project (after -r switch you can specify any supported platform, for more information use this link). You must also install prerequisites to the target device (see link), then you can copy this folder
<Project path>bin\<Configuration>\netcoreapp2.0\<Runtime identifier>\publish
to ARM device and run the application.
Summary
This article shows the composition of parts of the platform and how parts communicate with each other and that the platform is not limited only to one operating system. It works with Windows, Linux, macOS, even on ARM architecture. In next part of an article, I will tell you about the development of USB to CAN converter and sensors.